This post is an update to the post I made a while back on a design I came up with for motorizes shoes that you wear while playing a virtual reality game. The shoes keep you in the same spot as you walk or strafe in any direction, sort of like a treadmill.
I still plan on using the algorithms I talk about in the previous post, but the design has changed. The design in the last post didn’t work out for a number of reasons. I go over those reasons in the following video.
The problems included:
Since the wheels were off to the side of the foot, when the wheels turned there was a huge tendency for the shoe to rotate around my foot, so it would twist my ankle.
Under the foot were ball transfers, then the wheels were off to the side. The ball transfers had to support most of my weight. Since the ball transfers were supporting most of my weight, the wheels ended up with not enough force pushing them into the ground. This resulted in the wheels skidding on the floor. I tried to move the ball transfers up so that the bottom of the wheels were lower than the bottom of the ball transfers in an attempt to put more weight on the wheels. This worked somewhat, but caused another major problem where since the ball transfers and wheels were no longer along the same plane the shoe would rock back and forth terribly when I lifted my foot to take a step forward.
Because of the ball transfers it was hard to hold the shoe in place. The wheels could be braked, but the ball transfers were still free to move. Since the ball transfers were supporting most of my weight, the wheels braking didn’t really hold the shoe in place when I wanted it to not move. It was very easy for the shoe to move and hard for me to balance.
The main lesson I learned is that I cannot try to transfer my weight horizontally over to the wheels. I decided that in my design, the wheels had to be directly under my foot so that they would take all the load. To achieve this the wheels needed to be small, otherwise the shoe would be tall and it would feel like wearing platform shoes and be hard to balance.
I experimented with making small omni wheels. If you’re interested you can see the different designs I tried and the problems I ran into in the videos below.
Making omni wheels that small (1″ diameter or less) proved to be a challenge. There were two main issues I ran into. The first is that the rollers on the omni wheels only wanted to spin nicely if they were perpendicular to the floor. So the bearing in the roller was perpendicular to the floor. If the bearing inside the roller was angled it didn’t want to roll nicely. They’re not a thrust bearing, and I’m putting all of my weight on these bearings, so it makes sense.
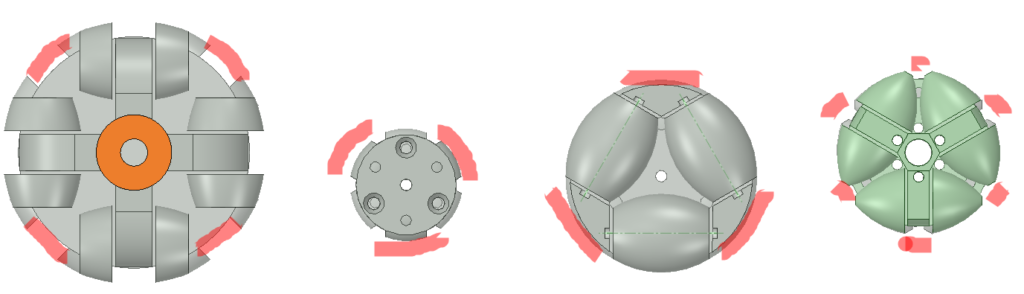
The second and bigger issue I ran into when trying to design these tiny omni wheels was that they were bumpy. As the shoe rolled forward it felt like the shoe was vibrating out of control. The vibration also put a ton of stress on the motor. This was because as they rotated, they would hit the gap in-between the rollers and cause a small bump. The gaps are shown below by the red highlighter.
I tried to counteract this gap by having each omni wheel rotated 45 degrees, so where there is a gap in one omni wheel there is a roller for another. You can see what I mean in the image below. This didn’t seem to help with the bumpiness thought.
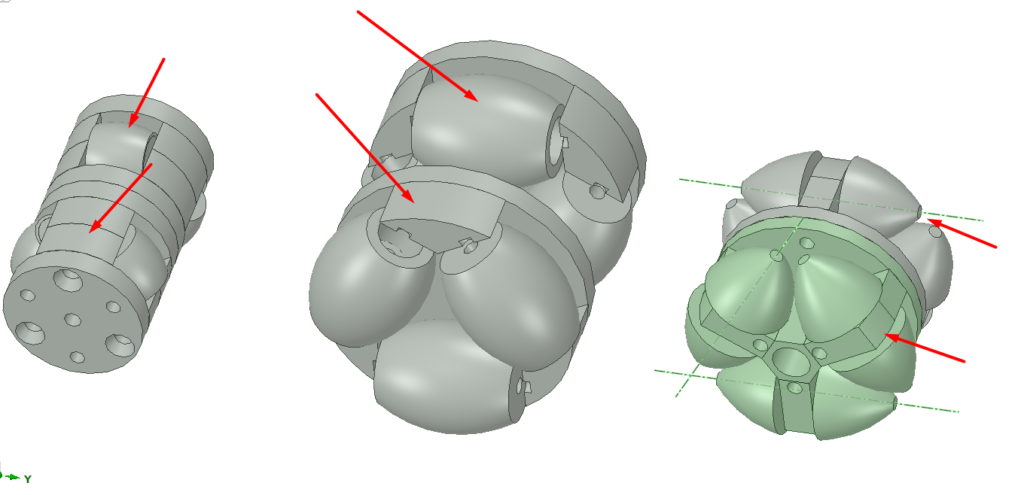
I tried to come up with my own design for an omni wheel that could be small and not bumpy. I came up with a new design and go over it in this video.
Instead of a wheel, it’s a sphere. The sphere can roll in one direction by rotating the rods that go through it. It can roll in the other direction because the middle of the sphere is a roller, with a bearing in the middle. The gaps between the sides of the sphere and the middle roller are very small and don’t cause any bumpiness. I call these things omni spheres.
My current design uses omni spheres. You can see the design in my latest video (at the time of writing this article).
I’ll be coming out with another video soon, and in it I’ll show that I was able to step on the shoe with all of my body weight, and have the omni spheres coupled to a motor move me around. No bumpiness. When the rollers are orientated correctly, the shoe can smoothly roll in the other direction.
There are still some issues to work out, but I’m moving forward with this design and it seems to be working.
Last Thursday, November 21, 2019 I posted this article that briefly talks about my virtual reality motorized shoe that I’ve been working on. I briefly describe it and link to my YouTube playlist build log series. I created the YouTube channel on November 14, 2019, and uploaded videos 1-4 in the series. In video #2 I talk in detail about the design, except for the binding component. The 5th video was uploaded on November 21, 2019, where I talk about the binding component in detail. I’m going to try to upload a new video about once a week.
I also made an Imgur post about the VR shoe on November 21, 2019, and it got an incredible amount of views and made it to the front page. As of today it has about 127k views.
In this post I would like to go into more detail about how the VR shoe works, including how the sensors and algorithm that tell the shoes what to do work.
Current Solutions
A problem with current virtual
reality set ups is that you have to stand in one spot. If you walk forward, you
will run into whatever is in front of you (a wall or physical object). To make
the virtual reality experience more immersive, it would be ideal to be able to
walk infinitely in the virtual world, in any direction, but stay in the same
spot in the real world.
Solutions for this problem
already exist; they are called omni-treadmills. Below are examples of
omni-treadmills.
You can see that the first two consist of a platform that is slippery so that the user can slide her feet. The Infinadeck relies on conveyors. All of the treadmills are bulky, heavy, not available for purchase for the individual consumer, and from what I could find, very expensive. I also wonder how natural it feels to walk on a slippery surface and slide your feet back.
My Solution
At a high level, my idea is a motorized shoe that allows a
person to walk while staying in the same physical location. Using this device
and other VR equipment, a user can walk infinitely in a video game while
staying in the same physical location in the real world.
Omni-treadmills are large and heavy contraptions, making them hard to move and store. My motorized shoes are lightweight and can easily be stored in a closet. My design will also have of a safety harness connected to a support structure or a hook in the ceiling to make sure the user does not fall over.
My Design
My design consists of a platform that is moved around by a pair of motors and a pair of omni-directional wheels. One omni-directional wheel is shown in Figure 1.
Figure 1: Omni-directional wheel.
One omni-directional wheel is coupled to one motor via sprockets and a chain, as shown in Figure 2. A gear train or belt pulley system could also be used to couple them together.
Figure 2: An omni-directional wheel and motor coupled together via a chain and sprockets.
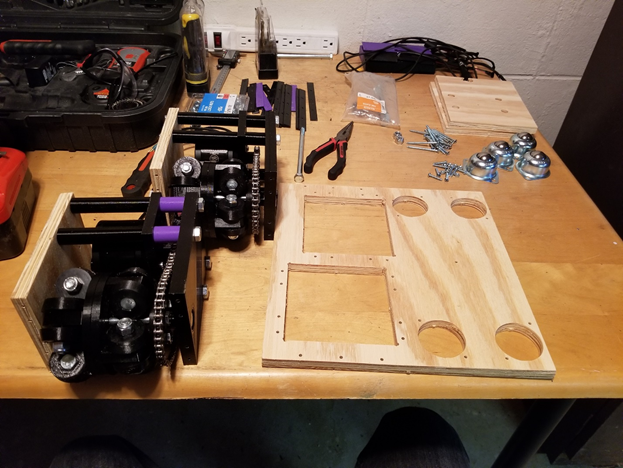
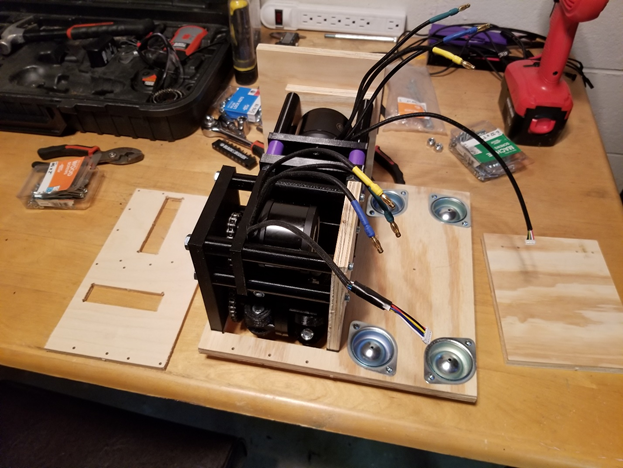
I call the component shown in Figure 2 a drive assembly. Two
drive assemblies are coupled to a platform. Figure 3 shows the two drive
assemblies and the platform.
Figure 3: Two drive assemblies and platform
Figure
4 shows the drive assemblies coupled to the platform.
Figure 4: Two drive assemblies coupled to the platform.
You can see that the drive assembly closest to the camera is
coupled in one direction, and the drive assembly further away from the camera
(partially obstructed from view) is coupled in 90 degrees off from the other
drive assembly. This is so that the shoe can move in any direction when the
motors are powered up. The drive assembly closest to the camera, when the motor
is turned on and the wheel is acuated, will cause the shoe to move forward or
backward. For the other drive assembly, when its motor is powered on and the
wheel turns it will cause the shoe to move side to side. If both motors are
powered on at the same time, the shoe will move at a 45 degree angle. If both
motors are turned on and the motors rotate at different speeds, the shoe can be
moved at other angles. So the shoe can move at any angle by controlling the
motors turning on and off and controlling their speed.
If the shoe should not move, it can brake the motors to
prevent the shoe from moving. For example, if the user is standing still, the
motors will brake such that the wheels will not move and the shoe will resist
moving in any direction. If the user is walking straight forward, then one
drive assembly (the one closest to the camera) will actuate its wheel to move
in the forward direction, while the other drive assembly will brake and have
the wheel locked in place so that the shoe resists any movement from side to
side.
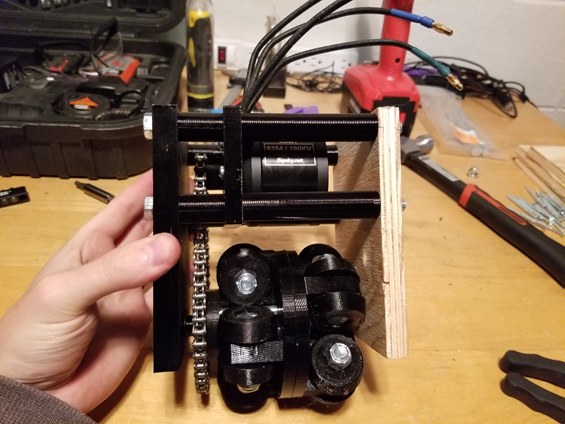
These two short videos show a prototype of the shoe I built. The first video shows one drive assembly’s motor powered on so that it brings my foot backwards. The second video shows the other drive assembly’s motor powered on to bring my foot sideways.
Figure 4 also shows 4 ball transfer units coupled to the platform.
These ball transfers support the weight of the person. Ball transfers are ideal
because they are small and allow movement in any direction. Casters could also
be used, or any wheel/sphere that supports movement in any direction.
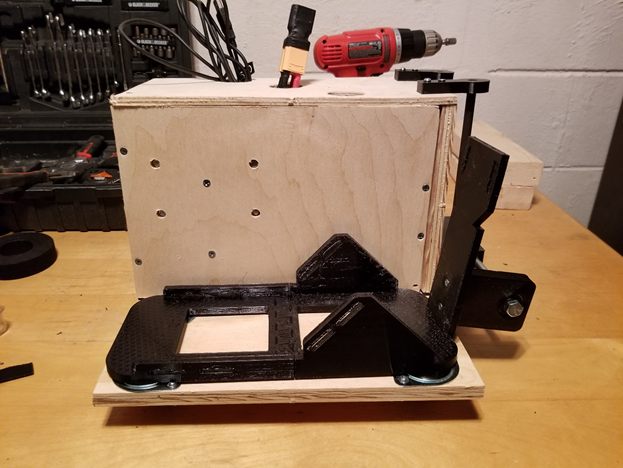
Next, there is a component that straps to the
user’s foot while keeping the user coupled to the shoe. This component allows
the user to lift his foot while staying coupled to the shoe. The component is
shown in Figure 5 and Figure 6.
Figure 5: Binding component that couples the user’s foot to the shoe.Figure 6: Binding component that couples the user’s foot to the shoe.
The user will use straps to secure his foot to the binding
(straps go through the rectangular holes), as shown in Figure 7.
Figure 7: Foot strapped to motorized shoe.
The user can lift his foot while still being coupled to the
shoe, as shown in Figure 8.
Figure 8: Lifting foot while still being coupled to motorized shoe.
The user remains coupled thanks to the binding the foot is strapped into being connected to the shoe along two rods, as shown in Figure 6 and Figure 8. The binding can move up and down along the rods. This video also shows the motion. The two rods could be substituted for extension slides or rails.
Using the binding component, when the user wants to walk in
any direction he will first lift his foot like he would normally do when
starting to walk. The shoe will roll along the floor as the user lifts his foot
in the air. When the user brings his foot back down, the motors will activate
to bring the user’s foot back to where it started. This motion is shown in the
following video.
A safety harness will be used in this design. The user will
secure a safety harness to the ceiling above them (or some support structure
above them, such as something like a portable pull up bar). This harness will
prevent the user from falling.
Powering the Motorized Shoe
The motorized shoes could be either powered by a battery or
a power supply. For a battery, the battery could be part of the motorized shoe
or be secured to the user, such as in a belt or backpack. For using a power
supply, wires will need to be run along the user up and over the user’s head
then to a power supply. This is to support the user turning 360 degrees without
the wires wrapping around the user. Above the user’s head, a slip ring can be
used to allow the wires to spin 360+ degrees while being connected to the power
supply.
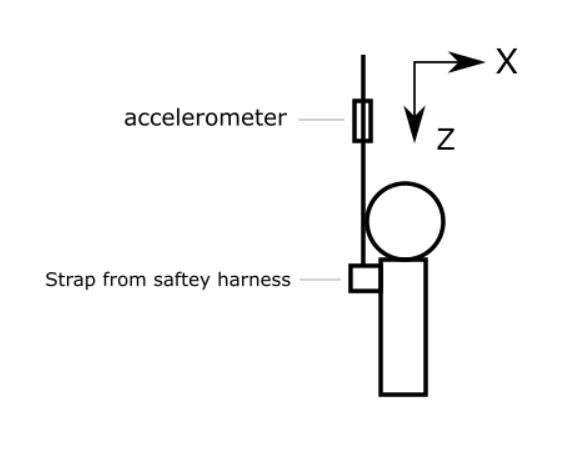
Safety Harness Sensor
The tether connecting the safety harness to the ceiling or
support structure can include an accelerometer or gyro sensor. This sensor can
be used to detect where the user is relative to the center point of the entire
assembly. Figure 9 shows where the accelerometer will be.
Figure 9: Sensor attached to safety harness tether.
Modern day accelerometer can measure acceleration in 3 or
more directions, including the acceleration due to gravity. In the above image,
the accelerometer will detect the acceleration due to gravity in the Z
direction. The X and Y directions will not feel any acceleration due to
gravity. Using the detected acceleration due to gravity, a 3D vector can be
constructed. In this case, the X and Y components of the vector are 0, and the
Z component is 9.8 (assuming the accelerometer reports acceleration in meters
per second per second).
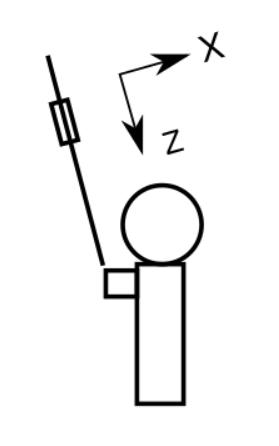
If the user takes a step forward, then the accelerometer
will detect this because the Z axis will detect less of a pull due to gravity,
and the X direction will start to feel a pull due to gravity, as shown in
Figure 10.
Figure 10: Accelerometer position when user is ahead of start position.
Another 3D vector can be constructed. The X component could
be 4 and the Z component could be 7, for example. If the user then takes a step
directly left or right (relative to their point of view), the Y component will
feel a pull due to gravity. Then the Y component could also be 4, for example.
Then the 3D vector will be (4, 4, 7). Using this vector, the direction the user
is away from the center point can be measured. The exact distance the user is
away from the center point cannot be precisely measured unless the height the
accelerometer is from the ground is known, but knowing the exact distance is
not necessary.
Sensors will also be placed in the motorized shoes themselves. These sensors will be able to track the speed and direction the motorized shoes are moving in.
Return to Center Algorithm
I’ll now explain how the sensors in the motorized shoes and
the sensor attached to the safety harness tether can be used to turn the motors
on and off such that the user will constantly be moved back to his starting
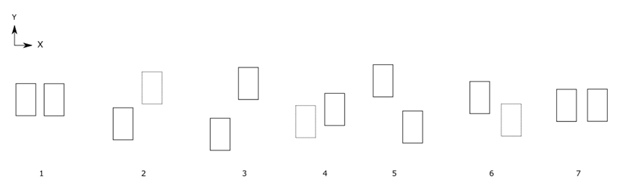
position as he walks. Please take a look at Figure 11.
Figure 11: Shoe positions when walking forward – solid rectangles mean that the user’s foot is on the platform. Dashed rectangles mean the user’s foot is in the air and the platform is being pulled along.
When the rectangle is solid, that means that the user’s foot
is on the motorized shoe. When a rectangle is dotted, that signifies that the
user’s foot is in the air and the user is bringing the shoe forward (or to the
side) along with their foot.
Step 1 is the starting position of the user, where they are
standing still, shoulder-width apart. In step 2, the user starts taking a step
forward. The right foot is in the air, and the motorized shoe is being brought
forward along with the user’s foot. The sensor in the right shoe will detect an
acceleration in the positive Y direction. The acceleration in the positive Y
direction in the right shoe will trigger the left shoe’s main motor to turn on.
The left shoe will be start moving backwards. The velocity that the left shoe
will move backwards will be calculated by integrating the acceleration of the
right to find the velocity of the right shoe. Then the actual velocity of the
left shoe will be found the same way. So the speed of the shoe attached to the
foot in the air determines the speed of the shoe attached to the foot on the
ground.
In step 3, the user has put their right foot down on the
motorized shoe assembly again. In step 4, the user lifts their left foot and
begins moving it forward. Just like in step 2, when acceleration is detected in
the left shoe, the right shoe is signaled to move backwards.
In step 5, the user has brought their left foot down. Now
the user decides to take one last shorter step, and then to stop. The shorter
step is shown in step 6. In step 7, when the user brings their right foot down,
she does not start to move their left foot. Since she doesn’t move their left
foot, no acceleration in the left foot is detected, so the motors in the right
foot’s shoe do not start up.
Let’s now imagine that in step 5, instead of the user taking
another step forward, she decides to take a step to the side, as shown in
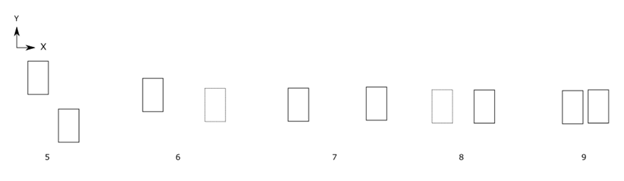
figure 12.
Figure 12: Shoe positions when user is strafing.
Shown in step 6, the user will lift their right foot and
start moving it in the positive X direction. In step 7, the user has put their right
foot down. In step 8, she continues their strafing to the right. She brings
their left foot up and starts moving it I the positive X direction. Since
acceleration in the left shoe is detected, the right shoe will start moving
backwards. In step 9, the user brings their left foot down. So to summarize,
the direction and speed the user lifts his foot in is detected by the sensor
and used to tell the opposite shoe how fast to move and what direction to move
in.
The sensor attached to the safety harness tether will be
used to correct for slight errors in the above process. In step 9, the user
could end up slightly to the right of the center point. The sensor attached to
the safety harness will detect this, and can instruct the motors in both shoes
to turn on and bring the user to the center.
The algorithm, step by step, is as follows.
Acceleration in one of the motorized shoes is
detected. The sensor in the motorized shoe will detect acceleration along the X
and Y axes.
The velocity in the X and Y directions of the
motorized shoe that is moving is extrapolated from the measured acceleration. A
2D velocity vector is constructed using the X and Y velocities.
The other shoe, which acceleration was not
detected in, will have its motors activated so that the motorized shoe starts
to move. It will move at the same speed as the other shoe, but in the opposite
direction. The velocity of this shoe will be extrapolated from its own
acceleration. Once the velocity matches the velocity of the other shoe, speed
will be held steady.
When acceleration in the first motorized shoe
stops, the motors in both shoes will be turned off.
The sensor attached to the tether of the safety
harness will detect of the user is some distance away from the center point.
The center point is defined as the point where this sensor only measures
acceleration due to gravity in the Z direction.
If the user is at a position such that actuating
them would cause the user to be brought back to the center point, then the
motors in both shoes will start up to actuate the wheels until the center point
is reached.
Interfacing with a Video Game
When the motorized shoes move, the microprocessor can send
the speed and direction to a driver on the user’s computer. This driver acts as
a typical video game controller driver. The direction and speed that the user
is moving in the real world will be communicated to a video game using the
driver, so that the user’s avatar in the video game moves in the same direction
and at a configured speed. The configured speed in game could, for example, be
twice as fast as the user actually moves in the real world.
Possible Design Improvements
Below are some possible design improvements that I am going
to consider. I don’t believe any of these improvements are major design
changes.
Alternative to Accelerometer Attached to the Safety Harness Tether
Instead of using an accelerometer attached to the safety
harness tether to detect when the user is outside of the center point, and then
used to actuate the wheels to bring the user back to the center point, I could
possibly replace the tether with a strong pole that has a string spring or
bungee cord attached to it. The pole can be similar to what previous versions
of the Infinadeck had, which you can see
here.
If the user leaves the center point, the bungee cord or
spring will be decompressed. Then the bungee cord or spring will compress and
bring the user back to the center point.
Push Button to Detect When the User Raises and Lowers their Foot
I may find that I need to know when the user raises or
lowers their foot. To do this, I can add a push button to the binding so that
when the user lifts their foot, the push button is not pressed. When the user
lowers their foot, the push button is pressed.
Calibrating the Accelerator Algorithm
I may find that for some people, when they are walking it
would feel more natural if the motorized shoe assembly would move the user’s
foot back at a slightly different velocity than the velocity of the foot moving
forward.
To accomplish this, I can create a separate small device that
the user straps onto their shoe. This device will contain an accelerometer or
gyro. This device is used separate from all of the other components, meaning
she is not strapped into the safety harness or the motorized shoe assembly.
When the user activates the device, she can walk forward, backwards, side to
side as much as she wants. She should do this in an open area so that she has
enough room to walk in every direction. While the user walks, the device will
collect the accelerations of the user’s feet. This data can then be used in the
algorithm to slightly adjust the speeds at which the motorized shoes move so
that it feels more natural for that user.
Crouching Support
Support for detecting when the user crouches, so that the
user’s avatar in a video game can crouch, can be easily added by adding a
spring or bungee and a push button to the tether that attaches to the safety
harness. When the user crotches, the spring/bungee will be decompressed and the
push button will be un-pressed. This will signal to the microprocessor that the
user has crouched. When the user goes back to a standing position, the
spring/bungee will compress and the push button will be pressed, signaling to
the microprocessor that the user is now standing.
Jumping Support
Since the user can lift their feet without the whole
motorized shoe assembly coming off of the ground, it’s possible that the user
could do a small jump. An accelerometer could be added to the binding to detect
the rapid acceleration from the jump. When the user jumps, the microprocessor
can signal the video game controller driver to tell the user’s avatar in the
video game to jump.
It’s likely that to support jumping, shocks would need to be
added to the motorized shoe assembly to absorb the impact.
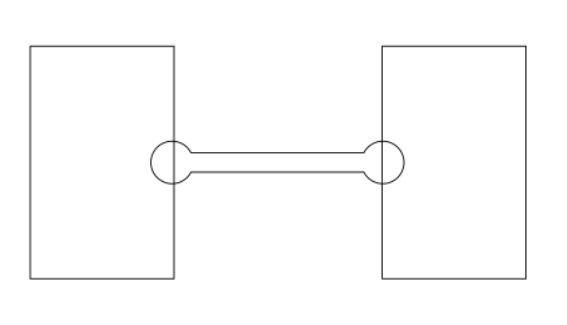
Spacer Rod
To make sure that the user, while strafing, won’t accidently run the motorized shoes into each other, a spacer rod could be connected in-between both shoes, as show in figure 13.
Figure 13: Spacer rod in between both motorized shoes
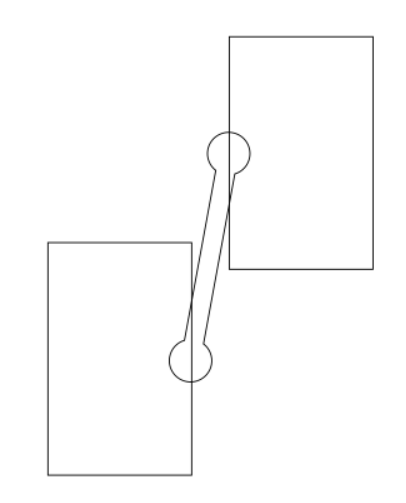
The rod can expand, but has a minimum length. When the user takes a step forward, it would look like Figure 14.
Figure 14: Spacer rod when user is walking forward.
The rod would also provide additional stability and make it virtually impossible to tip the shoes (towards each other) and role an ankle.
I recently started my YouTube channel, Finally Functional. Currently, I’m uploading videos about a project I’m working on in my spare time, which I call the VR shoe.
The VR shoe is a motorized shoe that is intended to be used when playing virtual reality games. The shoe is meant to keep you in the same place as you walk, like a treadmill. Unlike a treadmill, the VR shoes are omni-directional, meaning that you can walk in any direction, or even strafe side to side. The VR shoes will allow you to put your VR headset on, start up your game, and walk around in any direction in the virtual world while staying in the same spot in the real world.




{kind=link}