I have moved my VR Shoe content to this site. Please go there to learn about it. I’ve left the content here just for historical value.
This post is an update to the post I made a while back on a design I came up with for motorizes shoes that you wear while playing a virtual reality game. The shoes keep you in the same spot as you walk or strafe in any direction, sort of like a treadmill.
I still plan on using the algorithms I talk about in the previous post, but the design has changed. The design in the last post didn’t work out for a number of reasons. I go over those reasons in the following video.
The problems included:
- Since the wheels were off to the side of the foot, when the wheels turned there was a huge tendency for the shoe to rotate around my foot, so it would twist my ankle.
- Under the foot were ball transfers, then the wheels were off to the side. The ball transfers had to support most of my weight. Since the ball transfers were supporting most of my weight, the wheels ended up with not enough force pushing them into the ground. This resulted in the wheels skidding on the floor. I tried to move the ball transfers up so that the bottom of the wheels were lower than the bottom of the ball transfers in an attempt to put more weight on the wheels. This worked somewhat, but caused another major problem where since the ball transfers and wheels were no longer along the same plane the shoe would rock back and forth terribly when I lifted my foot to take a step forward.
- Because of the ball transfers it was hard to hold the shoe in place. The wheels could be braked, but the ball transfers were still free to move. Since the ball transfers were supporting most of my weight, the wheels braking didn’t really hold the shoe in place when I wanted it to not move. It was very easy for the shoe to move and hard for me to balance.
The main lesson I learned is that I cannot try to transfer my weight horizontally over to the wheels. I decided that in my design, the wheels had to be directly under my foot so that they would take all the load. To achieve this the wheels needed to be small, otherwise the shoe would be tall and it would feel like wearing platform shoes and be hard to balance.
I experimented with making small omni wheels. If you’re interested you can see the different designs I tried and the problems I ran into in the videos below.
Making omni wheels that small (1″ diameter or less) proved to be a challenge. There were two main issues I ran into. The first is that the rollers on the omni wheels only wanted to spin nicely if they were perpendicular to the floor. So the bearing in the roller was perpendicular to the floor. If the bearing inside the roller was angled it didn’t want to roll nicely. They’re not a thrust bearing, and I’m putting all of my weight on these bearings, so it makes sense.
The second and bigger issue I ran into when trying to design these tiny omni wheels was that they were bumpy. As the shoe rolled forward it felt like the shoe was vibrating out of control. The vibration also put a ton of stress on the motor. This was because as they rotated, they would hit the gap in-between the rollers and cause a small bump. The gaps are shown below by the red highlighter.
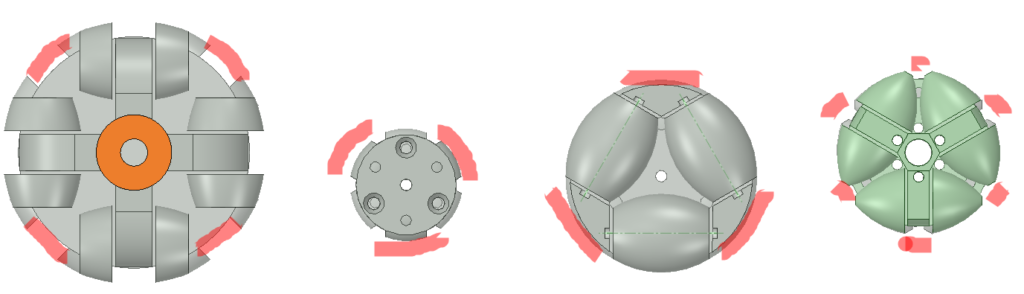
I tried to counteract this gap by having each omni wheel rotated 45 degrees, so where there is a gap in one omni wheel there is a roller for another. You can see what I mean in the image below. This didn’t seem to help with the bumpiness thought.
I tried to come up with my own design for an omni wheel that could be small and not bumpy. I came up with a new design and go over it in this video.
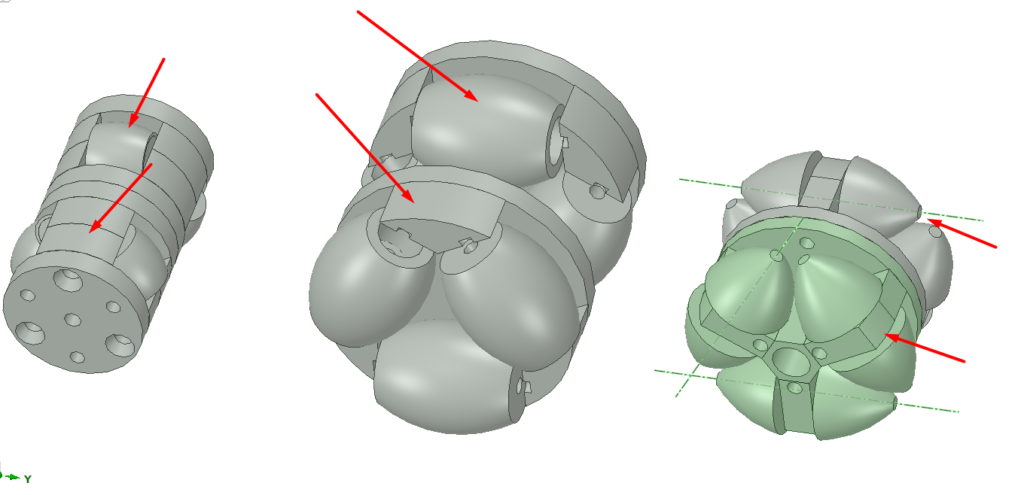
Instead of a wheel, it’s a sphere. The sphere can roll in one direction by rotating the rods that go through it. It can roll in the other direction because the middle of the sphere is a roller, with a bearing in the middle. The gaps between the sides of the sphere and the middle roller are very small and don’t cause any bumpiness. I call these things omni spheres.
My current design uses omni spheres. You can see the design in my latest video (at the time of writing this article).
I’ll be coming out with another video soon, and in it I’ll show that I was able to step on the shoe with all of my body weight, and have the omni spheres coupled to a motor move me around. No bumpiness. When the rollers are orientated correctly, the shoe can smoothly roll in the other direction.
There are still some issues to work out, but I’m moving forward with this design and it seems to be working.
I’m sure you’ve already investigated, but in case you haven’t… these wheels are incredible…
https://www.amazon.com/dp/B07WZJYVB5/ref=cm_sw_r_sms_apa_i_3oKPEbZG2063Q
Thanks for commenting Jiovanie. I think Mecanum wheels would suffer from the same bumpiness problem I ran into with the other omni wheels. I’m also not sure how I would miniaturize them. And one last thing is that to go any other direction than forward and backward with them, 1 or more of the wheels just stops turning while the others turn. I could be wrong, but with one wheel not turning it may produce a lot of friction.